プロジェクト背景および目的
建設業界ではデジタル化が急速に進展しており、自律技術の導入により大規模土木工事の施工方法が大きく変化しています。
–
インフラ開発分野のリーディング企業である当社クライアントは、GITSに対し、複雑な盛土作業を含む工程を自動化できる完全自律型建設システムの構築という明確なビジョンを提示しました。
–
顧客の要件は、資材の積載、ダンプトラックへの搬送、地盤整地、土壌転圧、地形形成といった一連の施工プロセスを自動化する包括的なプラットフォームの開発にありました。
–
最終的な目標は、大規模土木現場における重機運用の在り方を根本から変革する、オープンかつ拡張性の高い施工システムの構築でした。
–
本事例では、GITSが技術的・組織的課題を克服し、顧客の期待を上回るエンドツーエンドの自律施工システムを実現したプロセスをご紹介します。
主な機能
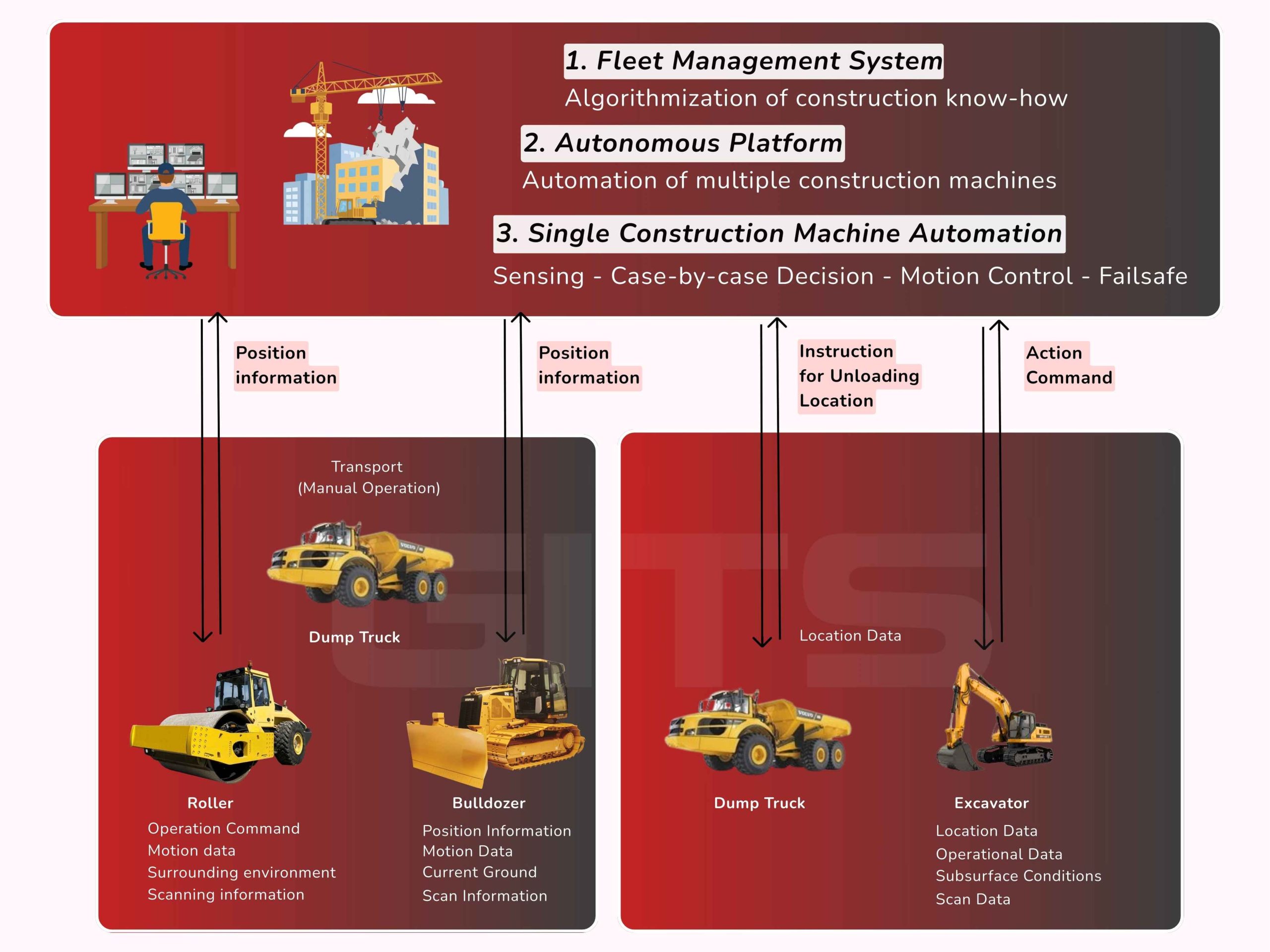
GITSが開発した自律施工システムは、相互に連携する2つの中核コンポーネントで構成されています。
1. フリート管理システム(Fleet Management System)
フリート管理モジュールは、施工全体を統括する運用中枢として機能します。
-
作業エリアのリアルタイムスケジューリングおよび監視
-
日次稼働車両数の把握
-
経路計画および位置追跡による重機移動の最適化
-
作業順序管理および能力計画
-
品質管理および施工プロセスの可視化
これにより、現場全体の進行状況をデータに基づいて管理でき、透明性と効率性の向上を同時に実現します。
2. 自律施工プラットフォーム(Autonomous Platform)
本システムの中核を担うのが、自律走行機能を備えた施工プラットフォームです。
指定エリア内で複数の重機を同時に制御し、相互干渉を防止しながら作業効率を最大化します。
–
また、事前に定義された指示に基づき、建設機械へ運用コマンドを送信する高度なシミュレーション機能を備えています。さらに、3D可視化マップにより、関係者は施工前の段階で完成形状を確認し、進捗状況を把握することが可能です。
主な課題と技術的挑戦
本システムの構築にあたり、いくつかの重要な課題が存在しました。
第一に、自律走行の基盤となるAutowareプラットフォームを用いた迅速なPOC開発の経験が限られていた点です。短期間で専門技術を習得し、実証環境を構築する必要がありました。
–
第二に、開発期間中に顧客要件が継続的に変化したことです。施工システムのビジョンが具体化するにつれ仕様が進化し、従来型のウォーターフォール手法では柔軟に対応できない状況が生じました。
–
第三に、顧客側にAIおよび機械学習分野の専門エンジニアが不足していた点です。そのため、GITSが技術的責任を包括的に担いながら、将来的な運用を見据えた知識移転も同時に行う必要がありました。
–
最後に、実際の重機挙動を高精度に再現するシミュレーションアプリケーションの開発は極めて高度な技術を要しました。多様な現場条件下における動作を再現するデジタルツイン構築が不可欠でした。
–
実装戦略および解決策
GITSは、戦略的な人材配置とアジャイル型プロジェクト管理を通じてこれらの課題に対応しました。
AIおよび自律システムの経験豊富なシニアエンジニアを中心に開発体制を構築し、機械学習アルゴリズム、コンピュータビジョン、ロボティクス分野の専門知識を活用しました。
–
また、顧客要件の変化に対応するため、柔軟なアジャイル開発体制を採用しました。これにより、仕様変更をリスクではなく改善の機会として取り込むことが可能となりました。
–
さらに、潜在的な技術課題を事前に特定し、顧客へ積極的に仕様提案を行うことで不確実性を低減しました。その結果、最終的なシステムは実運用環境に最適化された形で完成しました。
結論
本プロジェクトは、GITSが高度かつ複雑な自律施工システムを実装できる技術力と実行力を有していることを示す事例です。
–
技術的専門性と柔軟なプロジェクト管理を組み合わせることで、顧客のスマート建設への転換を支援し、効率性・安全性・革新性の新たな基準を確立しました。
–
自動・自律施工システムの導入をご検討の際は、ぜひGITSへご相談ください。貴社のプロジェクトに最適な構築方針をご提案いたします。